活動名稱
2019 人工智慧黑客松─自駕車、醫療影像、精準農業
2019 Artificial Intelligence Hackathon ─ Autonomous Driving, Precise Farming, and Medical Imaging
2019 人工智慧黑客松─自駕車、醫療影像、精準農業
2019 Artificial Intelligence Hackathon ─ Autonomous Driving, Precise Farming, and Medical Imaging
2019/08/29(四) 8:00 ~ 17:00
國立中正大學 智慧機器人自造基地 (活動中心一樓,湖畔咖啡廳旁)
確認報名完成後,即可開始使用Training Data訓練模型。活動當天另提供Test Dataset供參賽組別測試神經網路模型。
| 時間 | 活動流程 |
|---|---|
| 08:00~08:30 | 報到 |
| 08:30~09:00 | 活動開場 |
| 09:00~12:00 | 競賽活動 |
| 12:00~13:00 | 午餐時間 |
| 13:00~15:30 | 競賽活動 |
| 15:30~17:00 | 評分與頒獎 |
⊚ 在臺之大學以上在學生均可報名。
⊚ 不限領域、不限國籍,歡迎具研究、設計、軟體、硬體、管理、傳播、工程、資訊等各類專才與技術人員踴躍報名,亦歡迎國外交換生或正式學位留學生共同參與。
⊚ 每隊人數為2-5人。
⊚ 須有1人為團隊代表人,負責與主辦單位聯繫、確認參賽文件等事宜,惟代表人必須具中華民國國籍並在中華民國設籍之國民。
⊚ 即日起~2019/07/10
⊚ 參賽隊伍須於報到時間以團隊為單位完成報到,活動結束後經主辦單位確認全程參與活動無誤,參賽人員即可獲得參賽證明一只。
醫療影像—息肉狀脈絡膜血管病變(Polypoidal Choroidal Vasculopathy, PCV)是一種好發於亞洲人的一種眼科疾病,嚴重者會失明。PCV 是屬於老年性黃斑部病變的一種,主要特徵會在脈絡膜上形成血管擴張,會產生出許多細小分支的血管網,在血管網的末端通常可以發現有囊腫的息肉。
另一種類似 PCV 的病變為脈絡膜新生血管(Choroidal Neovascularization, CNV)這類新生血管相當脆弱,容易破裂後滲出血液造成視網膜水腫或是剝離。主要特徵同樣有許多細小的血管網,但血管末端沒有息肉。
為了能夠提早發現並給予適當的治療,醫師會透過拍攝眼底螢光血管攝影(Fluorescein Angiography, FA)來判斷是否有老年性黃斑部病變,透過打入體內的螢光顯影劑來觀察光線分布的情形去判斷。但是 FA 對於PCV 的檢查效果不太好,主要是特徵容易被擋住,穿透力弱不容易發現PCV。FA 往往是診斷中會先進行的一種方式,如果能透過在 FA 影像中就先篩選出 PCV 將會對患者的診斷有很大的幫助。
解題說明:
此題目最終目標在於辨識出息肉狀脈絡膜血管病變(Polypoidal Choroidal Vasculopathy, PCV)的醫療影像。
請透過CNV及PCV兩類之影像資料集先行訓練模型。競賽當天,再依照指定格式上傳辨識結果 (參見附件Excel檔案),評審將會依照參賽隊伍所提供的辨識率數值畫出ROC曲線圖,並計算曲線下面積(AUC),進行最終評分。
上傳格式檔案:上傳格式_醫療影像.xlsx
需提供資料的欄位:
⊚ ID(影像編號)
⊚ Score(分類機率)
Training Data
⊚ CNV
⊚ PCV
在自駕車領域,環境感測器、車連網通訊技術、人工智慧決策平台都是實現自駕車不可或缺關鍵因素。其中,環境感測器能夠協助自駕車感知周遭環境,為後續自駕車執行動作決策時,最為重要的考量資訊。而在這些感測器中,透過使用整合光達(Lidar)與視訊攝影機(RGB camera),並推論出完整且高解析度(Dense)之場景深度資訊之技術,則能夠提供完整且豐富的三度空間資訊,進而幫助後續自駕車系統對場景之理解與分析,如障礙物類別判斷、可行駛路徑規劃等。
為建立一個穩健且可靠的智慧場景理解系統,基於光達與視訊之高解析度場景深度預測為不可或缺的關鍵技術,該技術期望光達與視訊攝影機彼此之資訊可以有效互補,最後有效預測出拍攝場景影像中,每個像素點所對應的實際深度。例如,光達能提供稀疏之三維環境資訊,但缺乏詳細的場景細節,若透過視訊資訊的補償,演算法將有機會整合光達與視訊資料以建構完整且豐富的場景深度資訊。
解題說明:
最終目標為生成較為密集的LiDAR深度資訊圖,輸入為Sparse的LiDAR深度圖及RGB影像,由提供的KITTI數據集預先訓練模型。比賽當天由我方提供的測試資料集為輸入,輸出填補後的深度圖並上傳(請務必依照輸入影像的順序,如:輸入為1.png、2 .png 、3 .png ,輸出應為1 .png 、2 .png 、3 .png 對應的填補深度圖,避免影響計分結果),最終分數將以 Root mean squared error(RMSE)進行評分,RMSE將比較各組填補的深度圖以及Groundtruth(詳見評分標準)。
以下為整理過後的KIITI 數據集,與原先資料集內容相同(影像相同),只進行過資料分類處理。
⊚ groundtruth
⊚ sparse LiDAR
RGB:
⊚ RGB(1)
⊚ RGB(2)
⊚ RGB(3)
KIITI數據集由德國卡爾斯魯厄理工學院和豐田美國技術研究院聯合創辦,是目前國際上最大的自動駕駛場景下的計算機視覺算法評測數據集。
其中,對於場景深度預測任務,數據集提供超過93,000個經處理的完整深 度圖,並對應原始光達和視訊影像。
資料集包含38個類別,每一個類別是某一種植物的某一個病蟲害,一共有14種植物及26種病蟲害。訓練集有80%的葉片照片,測試集有20%的照片。需要用任何一種深度神經網路模型精準地分類上述38個類別。
精準度將以平均的f1-score計算,參賽者需要計算每一個類別的f1-score並且計算平均。此平均第一高者將獲勝。
(f1-score計算請參考: F1-SCORE)
上傳格式檔案:上傳格式_農業
⊚ 請上傳.CSV檔案
需提供資料的欄位:
⊚ ID(影像檔名)
⊚ LABEL(預測值)
Training Data

軟硬體共同設計
系統設計與正規驗證
即時嵌入式系統
晶片系統(SOC)
平行與分散式系統

電腦視覺
圖像辨識
生物特徵辨識

影像處理
電腦視覺
圖形識別
機器學習
智慧感測網路
人工學習智能

數位內容分析
多媒體資訊檢索
多媒體系統

光電半導體材料與元件
固態照明技術
光學薄膜設計與製鍍
光機系統設計
超快雷射光譜學
色彩工程學
色彩影像辨識系統
超頻譜影像技術

醫學/遙測影像分析
生醫信號處理
圖形識別
評估方式採用ROC曲線下面積( AUC )來計算。ROC曲線會採用TP, FP, TN, FN等數據來計算成TPR以及FPR。公式如下:
真陽性(TP):診斷為有,實際上也有高血壓。
偽陽性(FP):診斷為有,實際卻沒有高血壓。
真陰性(TN):診斷為沒有,實際上也沒有高血壓。
偽陰性(FN):診斷為沒有,實際卻有高血壓。
TPR = TP / ( TP + FN )
FPR = FP / ( FP + TN )
將依照「均方根誤差」進行評比。「均方根誤差」數值愈小排名愈前面。
「均方根誤差」的計分方式將採RMSE(Root mean squared error),公式如下:
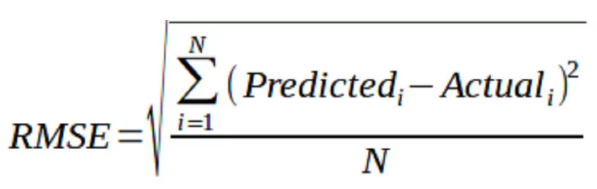
N:groundtruth影樣中非零的點數目
Predicted:各組的填補深度在 i 點的數值
Actual : groundtruth 在 i 點的數值
資料集中每一張深度圖計算一次RMSE,再將整個資料集中所有深度圖的RMSE取平均,得出最終分數進行評比。
精準度將以平均的f1-score計算,參賽者需要計算每一個類別的f1-score並且計算平均。此平均第一高者將獲勝。
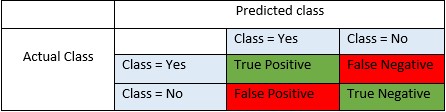
F1 Score = 2×(Recall × Precision) / (Recall + Precision
(f1-score計算請參考:F1-SCORE)
其中Precision = TP/TP+FP,Recall = TP/TP+FN
TP: True Positive, FP: False Positive, FN: False Negative 如下圖:
新台幣10,000元
新台幣6,000元
新台幣每組3,000元
新台幣每組1,000元


